二叉树
一、基本概念
二叉树是一种特殊的树结构,其中每个节点最多只有两个子节点,分别称为左子节点 和 右子节点。
| 术语 | 描述 |
|---|---|
| 根节点 (Root) | 树的起始节点,没有父节点。 |
| 叶子节点 (Leaf) | 没有子节点的节点。 |
| 度 (Degree) | 节点拥有的子树数量(在二叉树中度最大为 2)。 |
| 深度/高度 (Depth/Height) | 从根节点到最远叶子节点的最长路径上的节点数(或边数)。 |
二、特殊类型的二叉树
1. 满二叉树
- 定义: 一棵深度为
且拥有 个节点的二叉树。 - 特性: 树中所有非叶子节点的度都为 2,且所有叶子节点都在同一层(最底层)。
- 判断标准: 节点总数
满足 。
2. 完全二叉树
- 定义: 深度为
,有 个节点的二叉树。它的节点排列与满二叉树的前 个节点排列完全一致。 - 特性:
- 只有最底层(第
层)可能不满。 - 第
层的节点必须从左向右连续排列,中间不能有空缺。
- 只有最底层(第
- 用途: 堆 (Heap) 的底层结构就是完全二叉树,因为它允许用数组来高效地存储和访问节点。
三、二叉树的遍历
遍历是指按特定顺序访问树中的每个节点,每个节点仅访问一次。
| 遍历方式 | 顺序 | 递归实现 | 非递归实现 |
|---|---|---|---|
| 1. 前序遍历 (Preorder) | 根 |
易 | 使用栈 |
| 2. 中序遍历 (Inorder) | 左 |
易 | 使用栈 |
| 3. 后序遍历 (Postorder) | 左 |
易 | 使用栈(或两栈) |
| 4. 层次遍历 (Level Order) | 从上到下,从左到右 | 不常用 | 使用队列 |
四、二叉搜索树 (Binary Search Tree, BST)
1. 基本概念
- 定义: 一种特殊的二叉树,用于高效查找、插入和删除操作。
- 特性:
- 节点
的 左子树 中所有节点的值都小于 的值。 - 节点
的 右子树 中所有节点的值都大于 的值。 - 左、右子树本身也是二叉搜索树。
- 节点
- 如果你对一棵 BST 进行中序遍历(左 -> 根 -> 右),得到的结果一定是一个升序排列的序列。
2.当前节点子树的最小节点
- 核心逻辑:根据 BST “左小右大”的性质,子树的最小值一定位于该子树最左侧的末端。只需从当前节点开始,一直向左走直到没有左孩子为止。
- 时间复杂度:
- 平均情况:
。路径长度取决于树的高度。 - 最坏情况:
。如果树是一个向左倾斜的单链表。 // 1. 查找当前节点子树的最小节点
Node* findMin(Node* node) {
if (node == nullptr) return nullptr;
while (node->left != nullptr) {
node = node->left;
}
return node;
}
- 平均情况:
3.查找节点
- 核心逻辑:从根开始,将目标值与当前节点比较。若小则往左走,若大则往右走,相等则命中。
- 时间复杂度:
- 平均情况:
。每次比较都能排除大约一半的节点。 - 最坏情况:
。当树退化成链表时,需遍历所有节点。 // 2. 查找特定值的节点
Node* search(Node* root, int key) {
if (root == nullptr || root->data == key) return root;
if (key < root->data) return search(root->left, key);
return search(root->right, key);
}
- 平均情况:
4.下一个最大节点
- 核心逻辑:这是指中序遍历中紧跟在当前节点后的节点。逻辑分为两类
- 如果有右子树:最小值就在右子树的最左侧。
- 如果没有右子树:需要向上回溯,直到找到一个节点,它是其父节点的左孩子。
- 时间复杂度:
- 平均情况:
。通常只需下行或上行几步。 - 最坏情况:
。在极端不平衡的树中,路径可能跨越整个树高。 // 3. 查找下一个最大节点 (中序后继)
Node* findSuccessor(Node* x) {
if (x == nullptr) return nullptr;
// 情况 A: 有右子树,后继是右子树的最小值
if (x->right != nullptr) {
return findMin(x->right);
}
// 情况 B: 无右子树,向上找第一个“左拐”的父节点
Node* p = x->parent;
while (p != nullptr && x == p->right) {
x = p;
p = p->parent;
}
return p;
}
- 平均情况:
5.建立二叉搜索树
- 核心逻辑:建立 BST 的过程可以拆解为逐个元素的插入逻辑
- 初始化:开始时树为空(
root = nullptr)。 - 比较与递归:
- 如果树为空,创建一个新节点作为当前根节点。
- 如果新值小于当前节点值,递归进入左子树。
- 如果新值大于当前节点值,递归进入右子树。
- (可选)如果新值等于当前节点值,通常根据需求选择忽略或插入到右子树。
- 重复:对数组中的每一个元素重复上述过程。
- 初始化:开始时树为空(
- 时间复杂度:
- 平均情况:
当输入数据是随机分布时,树的高度趋于平衡(约)。插入 个节点,每个节点耗时 ,总计 。 - 最好情况:
当输入数据序列恰好能构造出一棵完全平衡的二叉树时,效率最高。 - 最坏情况:
如果输入数组是已经有序的,树会退化成一个单支链表。此时插入第个节点需要 次比较,总时间复杂度为 。
- 平均情况:
// 插入单个节点的逻辑 |
6. 插入
插入逻辑:
基于 BST 的特性,插入的新节点始终作为叶子节点(避免破坏现有结构),步骤如下:
- 空树处理:若 BST 为空,新节点直接作为根节点。
- 遍历查找插入位置:
- 从根节点开始,比较新节点值与当前节点值:
- 若新值 < 当前节点值:向左子树遍历(若左子树为空,插入此处)。
- 若新值 > 当前节点值:向右子树遍历(若右子树为空,插入此处)。
- 从根节点开始,比较新节点值与当前节点值:
- 插入节点:将新节点作为当前节点的左/右子节点。
代码实现:// 二叉搜索树节点定义
struct TreeNode {
int val;
TreeNode* left;
TreeNode* right;
TreeNode(int x) : val(x), left(nullptr), right(nullptr) {}
};
// 递归版插入
TreeNode* insertRecursive(TreeNode* root, int val) {
// 1. 空树:新节点作为根
if (root == nullptr) {
return new TreeNode(val);
}
// 2. 递归查找插入位置
if (val < root->val) {
root->left = insertRecursive(root->left, val); // 左子树插入
} else if (val > root->val) {
root->right = insertRecursive(root->right, val); // 右子树插入
}
// 3. 重复值:直接返回原节点(不处理)
return root;
}
// 迭代版插入(空间效率更高,无递归栈开销)
TreeNode* insertIterative(TreeNode* root, int val) {
TreeNode* newNode = new TreeNode(val);
// 1. 空树:新节点作为根
if (root == nullptr) {
return newNode;
}
TreeNode* curr = root;
TreeNode* parent = nullptr; // 记录当前节点的父节点
// 2. 遍历查找插入位置
while (curr != nullptr) {
parent = curr;
if (val < curr->val) {
curr = curr->left;
} else if (val > curr->val) {
curr = curr->right;
} else {
// 重复值:释放新节点,返回原树
delete newNode;
return root;
}
}
// 3. 插入新节点到父节点的左/右子树
if (val < parent->val) {
parent->left = newNode;
} else {
parent->right = newNode;
}
return root;
}
示例:
插入序列 [5, 3, 7, 2, 4, 6, 8]:
- 插入 5 → 根节点为 5;
- 插入 3 → 5 的左子节点;
- 插入 7 → 5 的右子节点;
- 插入 2 → 3 的左子节点;
- 插入 4 → 3 的右子节点;
- 最终 BST 结构:
5
/ \
3 7
/ \ / \
2 4 6 8
7.删除
删除操作是 BST 中最复杂的操作,需保证删除后仍满足 BST 特性,关键是找到删除节点的“替代节点”,步骤如下:
设待删除节点为 target,其父节点为 parent:
场景1:target 是叶子节点(无左、右子节点)
- 直接删除:将
parent指向target的指针设为nullptr,释放target。
- 直接删除:将
场景2:target 只有一个子节点(左子树或右子树非空)
- 替代逻辑:用
target的子节点替代target的位置(保持 BST 特性)。 - 操作:若
target是parent的左子节点,则parent->left = target->子节点;若为右子节点,则parent->right = target->子节点,释放target。
- 替代逻辑:用
场景3:target 有两个子节点(左、右子树均非空)
- 核心逻辑:不能直接删除,需找
target的中序后继节点(右子树中最小的节点)或中序前驱节点(左子树中最大的节点)作为替代,步骤:- 找到
target的中序后继successor(右子树一路向左到底的节点); - 用
successor的值覆盖target的值; - 删除
successor(successor最多只有一个右子节点,属于场景1或场景2)。
- 找到
- 核心逻辑:不能直接删除,需找
代码实现:// 辅助函数:找到以 root 为根的树的最小值节点(中序后继的核心)
TreeNode* findMin(TreeNode* root) {
while (root->left != nullptr) {
root = root->left;
}
return root;
}
// 递归版删除
TreeNode* deleteNode(TreeNode* root, int val) {
if (root == nullptr) {
return nullptr; // 未找到待删除节点,返回原树
}
// 1. 递归查找待删除节点
if (val < root->val) {
root->left = deleteNode(root->left, val); // 左子树查找删除
} else if (val > root->val) {
root->right = deleteNode(root->right, val); // 右子树查找删除
} else {
// 2. 找到待删除节点 root,处理三种场景
// 场景1:叶子节点(无左、右子树)
if (root->left == nullptr && root->right == nullptr) {
delete root;
return nullptr;
}
// 场景2:只有一个子节点(左空或右空)
else if (root->left == nullptr) { // 只有右子节点
TreeNode* temp = root->right;
delete root;
return temp; // 右子节点替代当前节点
} else if (root->right == nullptr) { // 只有左子节点
TreeNode* temp = root->left;
delete root;
return temp; // 左子节点替代当前节点
}
// 场景3:有两个子节点(找中序后继替代)
else {
// 找到中序后继(右子树最小值节点)
TreeNode* successor = findMin(root->right);
// 用后继节点的值覆盖当前节点
root->val = successor->val;
// 删除后继节点(递归处理,后继最多只有一个右子节点)
root->right = deleteNode(root->right, successor->val);
}
}
return root;
}
示例:
BST 结构如下,删除根节点 5(有两个子节点): 5
/ \
3 7
/ \ / \
2 4 6 8
- 找到 5 的中序后继:右子树(7)的最小值节点 6;
- 用 6 的值覆盖 5 → 根节点变为 6;
- 删除原后继节点 6(6 是叶子节点,场景1);
- 删除后 BST 结构:中序遍历结果仍为升序:
6
/ \
3 7
/ \ \
2 4 82→3→4→6→7→8,符合 BST 特性。
五、Huffman 编码树
1. 基本概念
- 定义: 一种带权路径长度最短的二叉树,也称为最优二叉树
- 带权路径长度 (WPL):
: 第 个叶子节点的权重(通常是字符出现的频率)。 : 根节点到该叶子节点的路径长度(编码的位数)。
- 构造方法: 贪心算法。每次选择森林中权重最小的两个根节点,将它们合并为一个新的父节点,并将其权重设置为二者之和。重复直到只剩下一棵树。
2. 关键应用:Huffman 编码
- 目的: 是一种变长编码方法,用于数据压缩。
- 原理: 出现频率高的字符,赋予较短的编码(路径短);出现频率低的字符,赋予较长的编码(路径长)。
- 特性: Huffman 编码是一种前缀编码,即任何字符的编码都不是另一个字符编码的前缀,这使得解码时不会产生歧义。
六、二叉树的存储表示
- 链式存储 (Linked Representation): 每个节点包含数据域、左子节点指针和右子节点指针。这是最灵活的方式,支持所有操作。
- 顺序存储 (Array Representation): 使用数组按层次顺序存储节点。
- 要求: 通常用于完全二叉树。
- 优点: 节省存储指针的空间,且可以快速定位父子节点(i从1开始):
- 节点
的父节点: - 节点
的左子节点: - 节点
的右子节点:
- 节点
- 缺点: 如果不是完全二叉树,会有大量空间浪费。
七.AVL
1. AVL 树的核心规则
- 平衡因子:每个节点都会记录其左子树高度与右子树高度的差值(
)。 - 平衡条件:AVL 树要求所有节点的平衡因子的绝对值都不超过 1(即
)。一旦某个节点的 ,就必须通过旋转来重新恢复平衡。 - 高度:AVL的高度为
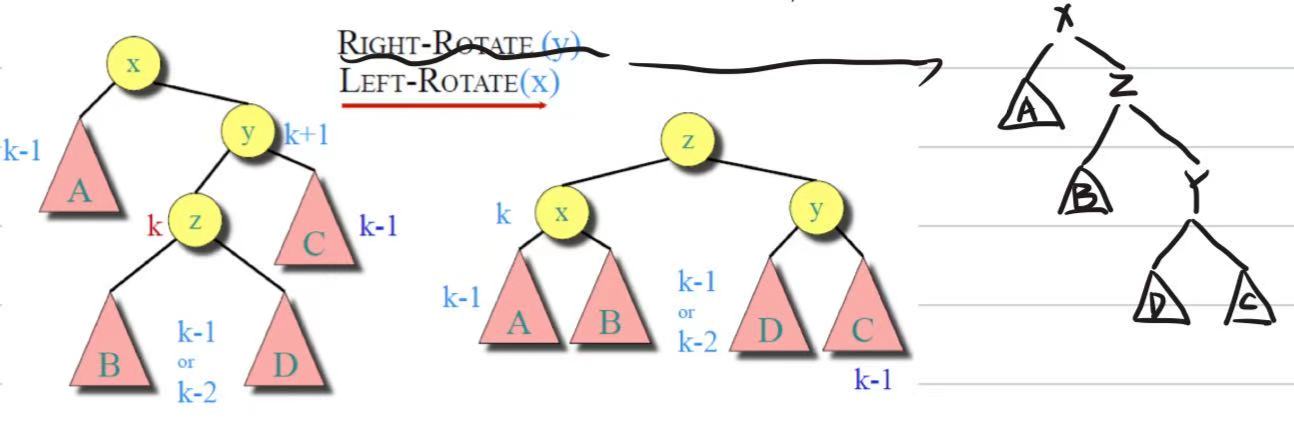
2. 四种旋转操作
当插入新节点导致失衡时,根据新节点相对于失衡节点的位置,分为四种旋转场景:
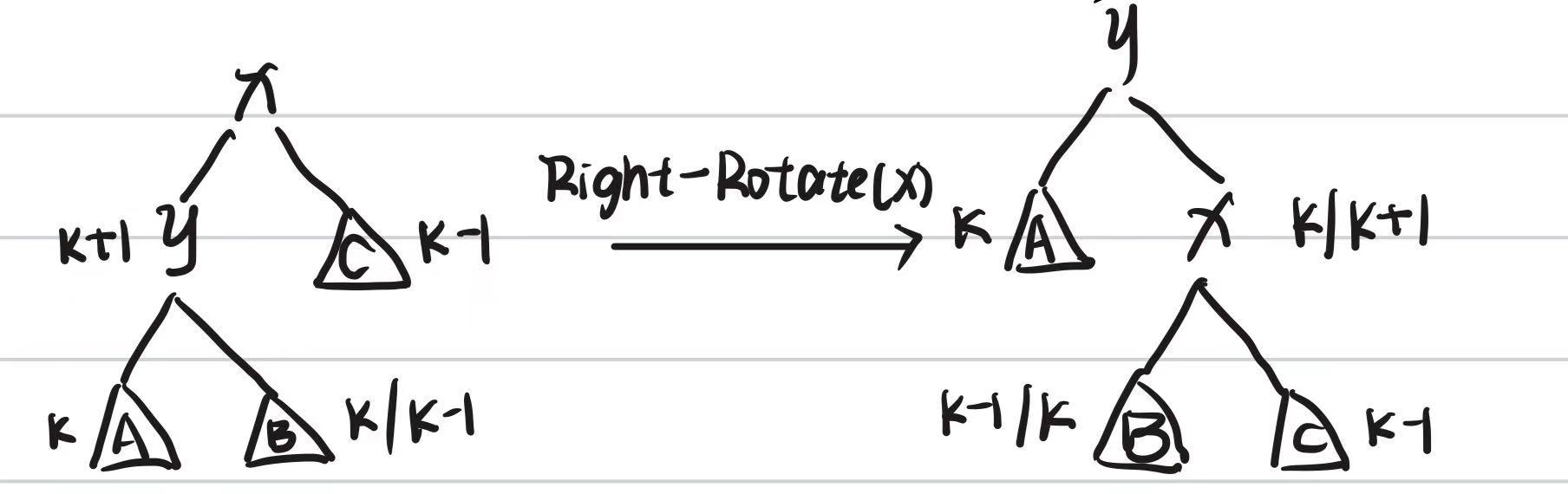
- LL(左左型):新节点插在左孩子的左子树。执行一次右旋。

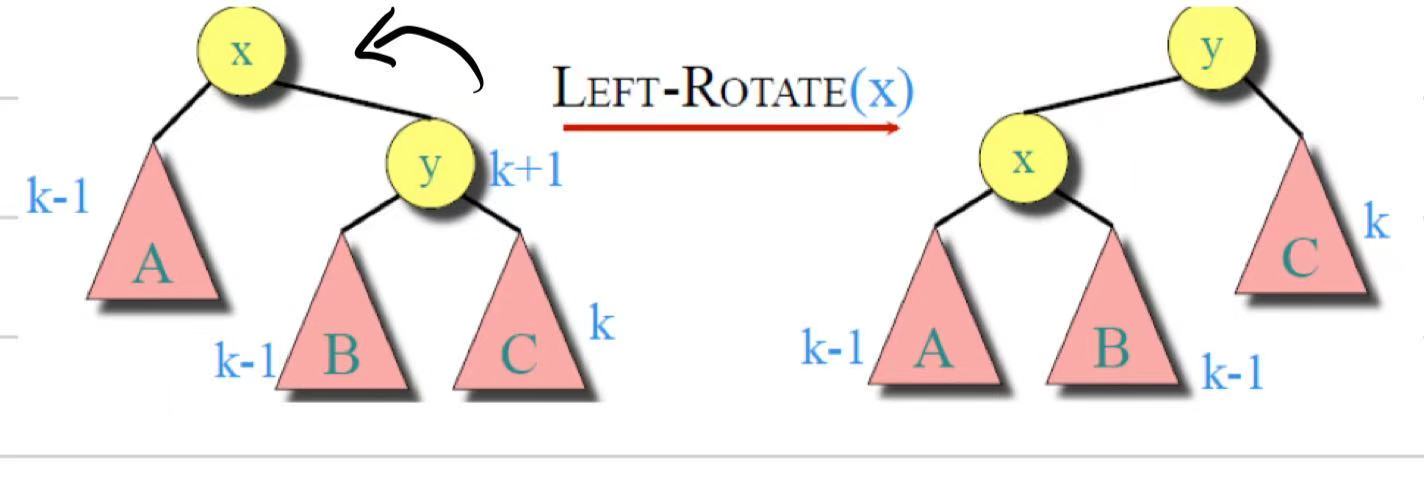
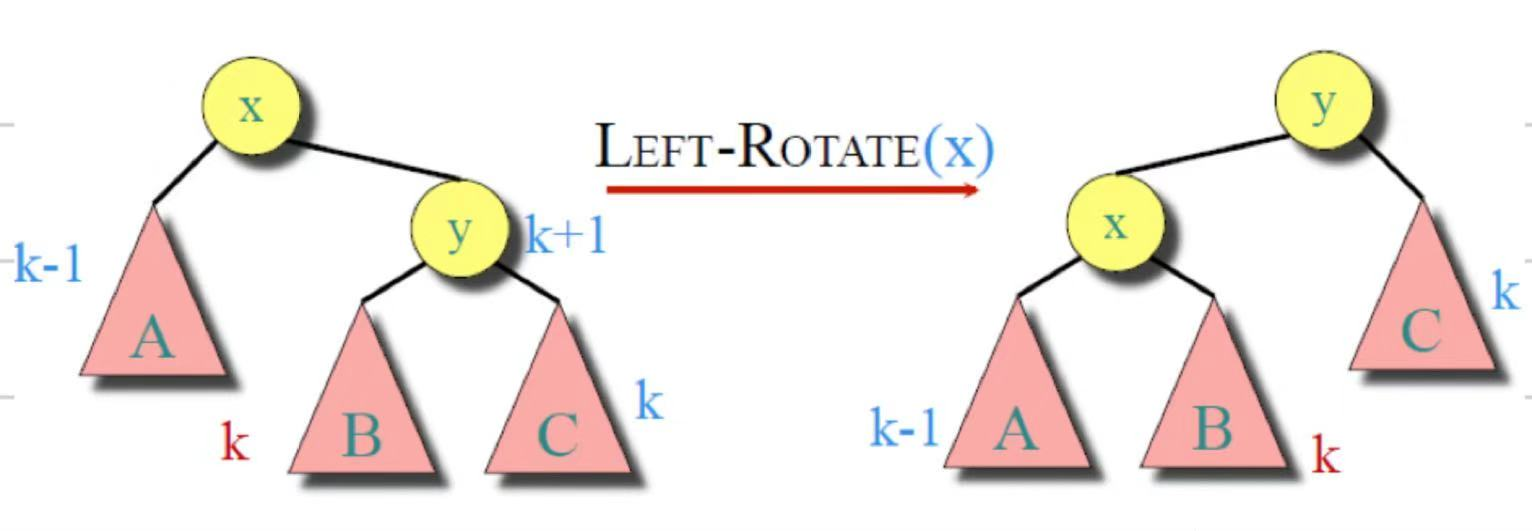
- RR(右右型):新节点插在右孩子的右子树。执行一次左旋。
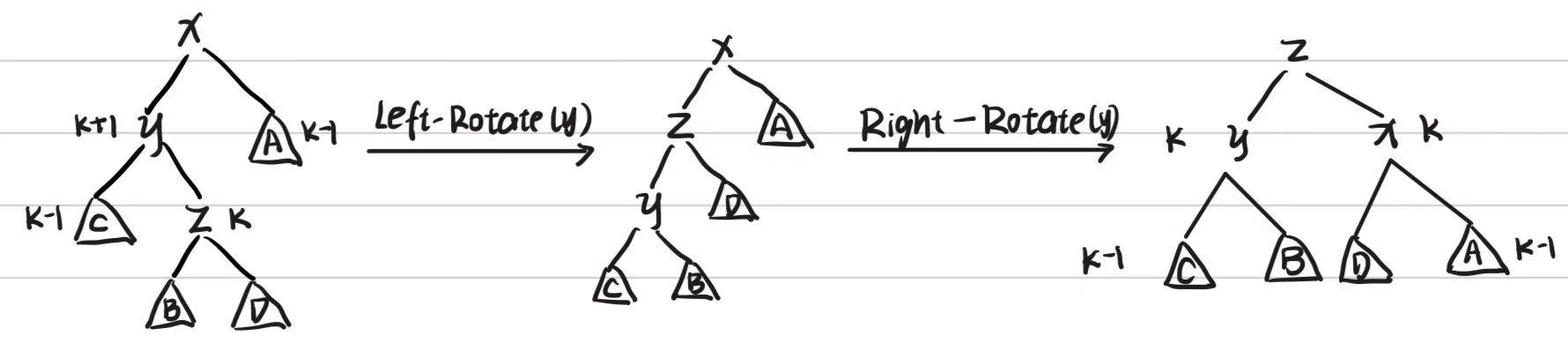
- LR(左右型):新节点插在左孩子的右子树。先对左孩子左旋,再对根节点右旋。
- RL(右左型):新节点插在右孩子的左子树。先对右孩子右旋,再对根节点左旋。