排序算法
一、排序的基本概念
1. 什么是排序?
排序是将一个无序的序列按照某种既定规则(通常是元素的大小关系)重新排列成有序序列的过程。
例如:将数组 [3, 1, 4, 1, 5, 9] 按照升序排列为 [1, 1, 3, 4, 5, 9]。
2. 排序的核心要素
- 比较器:定义元素之间的“大小”关系。默认通常是
a < b(升序)或a > b(降序)。 - 稳定性:
- 稳定排序:如果两个元素的值相等,它们在排序后的相对位置保持不变。
- 例如:
[(2, "a"), (1, "b"), (2, "c")]稳定排序后可能是[(1, "b"), (2, "a"), (2, "c")]。
- 例如:
- 不稳定排序:相等元素的相对位置可能发生变化。
- 例如:上述例子不稳定排序后可能是
[(1, "b"), (2, "c"), (2, "a")]。
- 例如:上述例子不稳定排序后可能是
- 稳定排序:如果两个元素的值相等,它们在排序后的相对位置保持不变。
- 原地排序:排序过程中不使用额外的存储空间(或仅使用常数级的额外空间),直接修改原始序列。
- 时间复杂度:排序算法执行所需的时间与数据规模
n的关系(通常关注最坏情况或平均情况)。 - 空间复杂度:排序算法执行所需的额外存储空间与数据规模
n的关系。
二、常见排序算法分类
排序算法可以分为比较类排序和非比较类排序两大类:
1. 比较类排序
通过比较元素之间的大小来决定它们的相对位置。时间复杂度通常为 O(n^2) 或 O(n log n)。
常见算法:
- 插入排序
- 冒泡排序
- 选择排序
- 快速排序
- 归并排序
- 堆排序
2. 非比较类排序
不通过比较元素大小,而是利用元素本身的特性(如数字的位数、计数等)来排序。时间复杂度可以达到 O(n),但适用场景有限。
常见算法:
- 计数排序(Counting Sort)
- 基数排序(Radix Sort)
- 桶排序(Bucket Sort)
三、常用排序算法详解
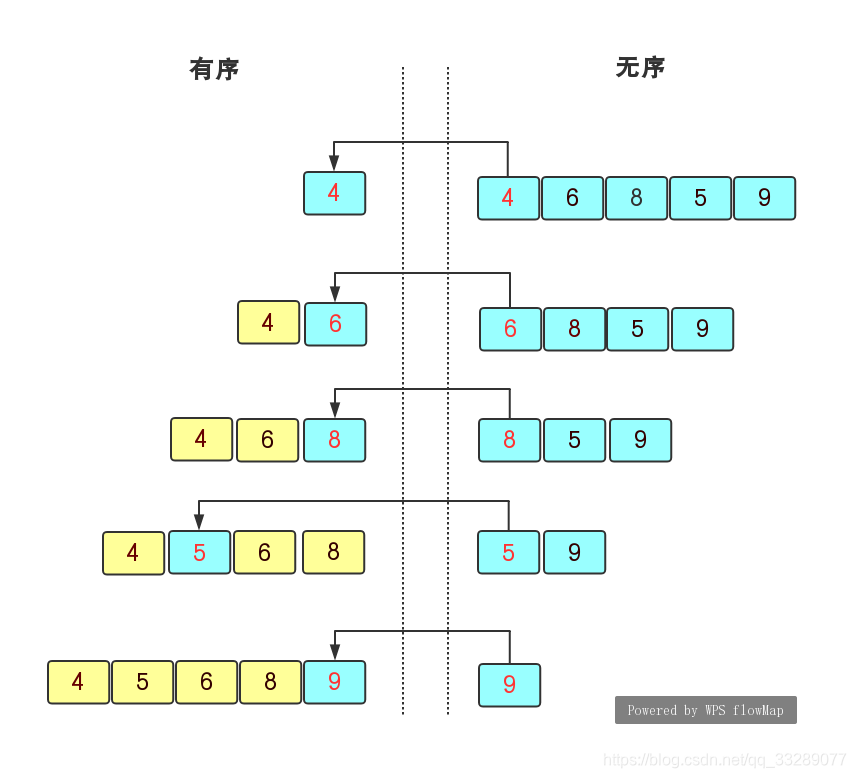
1. 插入排序
- 核心思想:将待排序元素逐个插入到已排序的子序列中,直到整个序列有序。
- 实现步骤:
1.从第一个元素开始,该元素可以认为已经被排序。
2.取出下一个元素,在已经排序的元素序列中从后向前扫描。
3.如果该元素(已排序)大于新元素,将该元素移到下一位置。
4.重复步骤3,直到找到已排序的元素小于或者等于新元素的位置。
5.将新元素插入到该位置后。
6.重复步骤2~5。 - 时间复杂度:
- 最好情况:
。如果数组本身就是有序的,内层 while循环几乎不执行。 - 最坏情况:
。如果数组是完全倒序的,每次都要移动大量元素。 - 平均情况:
。
- 最好情况:
- 空间复杂度:
O(1)(原地排序)。 - 稳定性:稳定。
- 适用场景:小规模数据或接近有序的数据。
// 插入排序函数
// arr: 待排序的向量
// ascending: true 表示升序,false 表示降序
void insertionSort(std::vector<int>& arr, bool ascending = true) {
int n = arr.size();
// 从第二个元素开始,逐个将元素插入到已排序的子序列中
for (int i = 1; i < n; ++i) {
int key = arr[i]; // 当前待插入的元素
int j = i - 1; // 已排序子序列的最后一个元素索引
// 将比 key 大(或小)的元素向后移动
if (ascending) {
while (j >= 0 && arr[j] > key) {
arr[j + 1] = arr[j];
j--;
}
} else {
while (j >= 0 && arr[j] < key) {
arr[j + 1] = arr[j];
j--;
}
}
// 将 key 插入到正确的位置
arr[j + 1] = key;
}
}
int main() {
std::vector<int> arr = {12, 11, 13, 5, 6};
std::cout << "Original array: ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
insertionSort(arr); // 默认升序排序
std::cout << "Sorted array (ascending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
insertionSort(arr, false); // 降序排序
std::cout << "Sorted array (descending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
return 0;
}
2. 冒泡排序
- 核心思想:重复遍历序列,每次比较相邻的两个元素,如果它们的顺序错误就交换位置,直到整个序列有序(较大的元素会像“气泡”一样浮到序列末尾)。
- 实现步骤:
- 遍历序列,比较相邻元素,若前大后小则交换。
- 每遍历一次,最大的元素会“冒泡”到末尾。
- 重复步骤 1 和 2,直到没有元素需要交换。
- 时间复杂度:
- 最好情况:
O(n)(序列已有序,加标志位优化)。 - 最坏情况:
O(n^2)。 - 平均情况:
O(n^2)。
- 最好情况:
- 空间复杂度:
O(1)(原地排序)。 - 稳定性:稳定。
- 适用场景:小规模数据,或作为教学示例。
// 冒泡排序函数
// arr: 待排序的向量
// ascending: true 表示升序,false 表示降序
void bubbleSort(std::vector<int>& arr, bool ascending = true) {
int n = arr.size();
bool swapped; // 标记是否发生了交换
// 外层循环控制排序轮数
for (int i = 0; i < n - 1; ++i) {
swapped = false;
// 内层循环进行相邻元素比较和交换
// 每一轮结束后,最大(或最小)的元素会"冒泡"到末尾
for (int j = 0; j < n - i - 1; ++j) {
if (ascending) {
if (arr[j] > arr[j + 1]) {
std::swap(arr[j], arr[j + 1]);
swapped = true;
}
} else {
if (arr[j] < arr[j + 1]) {
std::swap(arr[j], arr[j + 1]);
swapped = true;
}
}
}
// 如果某一轮没有发生交换,说明数组已经有序,可以提前退出
if (!swapped) {
break;
}
}
}
int main() {
std::vector<int> arr = {64, 34, 25, 12, 22, 11, 90};
std::cout << "Original array: ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
bubbleSort(arr); // 默认升序排序
std::cout << "Sorted array (ascending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
bubbleSort(arr, false); // 降序排序
std::cout << "Sorted array (descending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
return 0;
}
3. 选择排序
- 核心思想:每次从待排序序列中找到最小(或最大)的元素,将其与序列的起始位置交换,然后在剩余元素中重复此过程。
- 实现步骤:
- 在待排序序列中找到最小元素的索引。
- 将最小元素与序列的第一个元素交换。
- 在剩余的元素中重复步骤 1 和 2,直到整个序列有序。
- 时间复杂度:
- 最好情况/最坏情况/平均情况:
O(n^2)(无论序列是否有序,都需要遍历找最小元素)。
- 最好情况/最坏情况/平均情况:
- 空间复杂度:
O(1)(原地排序)。 - 稳定性:不稳定(例如
[2, 2, 1],第一次选择会将1与第一个2交换,导致两个2的相对位置变化)。 - 适用场景:小规模数据,或对稳定性无要求的场景。
// 选择排序函数
// arr: 待排序的向量
// ascending: true 表示升序,false 表示降序
void selectionSort(std::vector<int>& arr, bool ascending = true) {
int n = arr.size();
// 外层循环控制选择的轮数
for (int i = 0; i < n - 1; ++i) {
// 假设当前索引 i 是最小(或最大)元素的索引
int target_idx = i;
// 内层循环在未排序部分中找到最小(或最大)元素的索引
for (int j = i + 1; j < n; ++j) {
if (ascending) {
if (arr[j] < arr[target_idx]) {
target_idx = j;
}
} else {
if (arr[j] > arr[target_idx]) {
target_idx = j;
}
}
}
// 将找到的最小(或最大)元素与未排序部分的第一个元素交换
if (target_idx != i) {
std::swap(arr[i], arr[target_idx]);
}
}
}
int main() {
std::vector<int> arr = {64, 25, 12, 22, 11};
std::cout << "Original array: ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
selectionSort(arr); // 默认升序排序
std::cout << "Sorted array (ascending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
selectionSort(arr, false); // 降序排序
std::cout << "Sorted array (descending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
return 0;
}
4. 快速排序
- 核心思想:“分治法”——选择一个“基准元素”,将序列分为两部分,一部分元素小于基准,另一部分大于基准,然后递归地对这两部分进行排序。
- 实现步骤:
- 选择序列中的一个元素作为基准(通常是第一个、最后一个或中间元素)。
- 遍历序列,将小于基准的元素放到基准左边,大于基准的元素放到右边(分区操作)。
- 递归地对基准左边和右边的子序列进行快速排序。
- 时间复杂度:
- 最好情况/平均情况:
O(n log n)。 - 最坏情况:
O(n^2)(当序列已有序或逆序,且每次选择的基准是极值时)。
- 最好情况/平均情况:
- 空间复杂度:
O(log n)(递归栈空间,平均情况),最坏情况O(n)。 - 稳定性:不稳定。
- 适用场景:大规模数据排序,是实践中最常用的排序算法之一(C++
std::sort底层就是快速排序的变种)。
// 分区函数:将数组分区,并返回基准元素的最终位置
// [low, high] 是当前分区的范围
int partition(std::vector<int>& arr, int low, int high, bool ascending) {
int pivot = arr[high]; // 选择最右边的元素作为基准
int i = low - 1; // i 是小于(或大于)基准区域的边界
for (int j = low; j < high; ++j) {
// 如果当前元素小于(或大于)等于基准,则将其加入相应区域
if (ascending) {
if (arr[j] <= pivot) {
i++;
std::swap(arr[i], arr[j]);
}
} else {
if (arr[j] >= pivot) {
i++;
std::swap(arr[i], arr[j]);
}
}
}
// 将基准元素放到它的最终位置
std::swap(arr[i + 1], arr[high]);
return i + 1;
}
// 快速排序递归函数
void quickSortRecursive(std::vector<int>& arr, int low, int high, bool ascending) {
if (low < high) {
// pi 是分区后的基准元素索引
int pi = partition(arr, low, high, ascending);
// 递归地对基准元素左边和右边的子数组进行排序
quickSortRecursive(arr, low, pi - 1, ascending);
quickSortRecursive(arr, pi + 1, high, ascending);
}
}
// 快速排序入口函数
void quickSort(std::vector<int>& arr, bool ascending = true) {
if (arr.empty()) return;
quickSortRecursive(arr, 0, arr.size() - 1, ascending);
}
int main() {
std::vector<int> arr = {10, 7, 8, 9, 1, 5};
std::cout << "Original array: ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
quickSort(arr); // 默认升序排序
std::cout << "Sorted array (ascending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
quickSort(arr, false); // 降序排序
std::cout << "Sorted array (descending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
return 0;
}
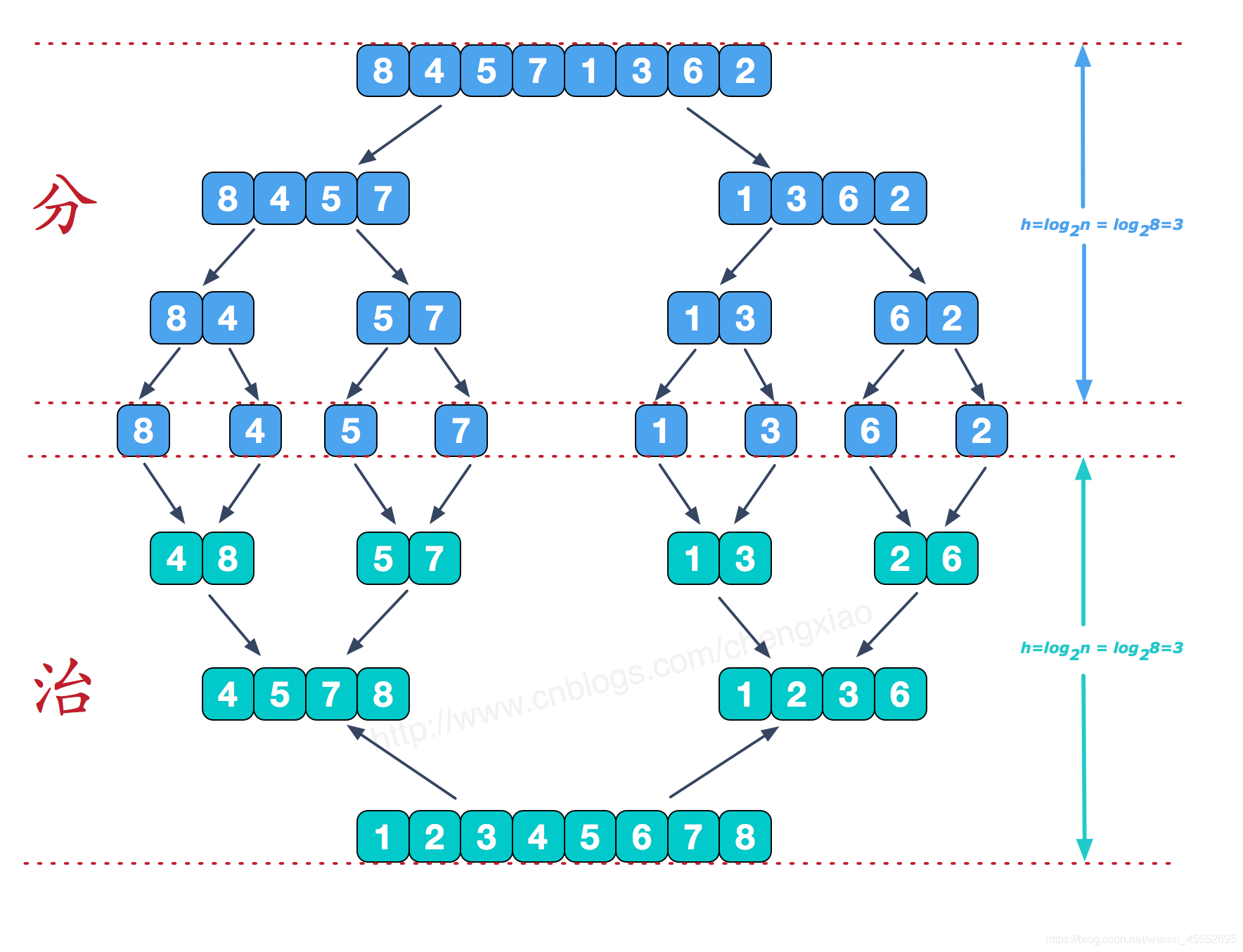
5. 归并排序
- 核心思想:
- 分解:将当前序列不断从中间切分,直到每个子序列只剩下一个元素(一个元素天然是有序的)。
- 合并:将两个有序的小序列合并成一个更大的有序序列,直到最终合并为完整的排序数组。
- 在合并两个有序数组
L和R时,我们使用两个指针分别指向它们的开头,比较指向的元素,将较小者放入临时数组中,然后移动指针。重复此过程直到所有元素都被放入临时数组。
- 在合并两个有序数组
- 实现步骤:
- 如果序列长度为 1,则已经有序,直接返回。
- 将序列分成左右两个子序列,递归地对它们进行归并排序。
- 将两个有序的子序列合并成一个有序序列(合并操作)。
- 时间复杂度:
- 最好情况/最坏情况/平均情况:
O(n log n)。 - 无论初始状态如何,数组总是被划分为
层,每层合并的操作量都是 。
- 最好情况/最坏情况/平均情况:
- 空间复杂度:
O(n)- 归并排序需要一个与原数组等大的辅助空间来存放临时合并的结果,这也是它相对于快速排序(原地排序)的一个劣势。
- 稳定性:稳定。
- 适用场景:大规模数据排序,尤其是对稳定性有要求的场景(例如
std::stable_sort底层通常是归并排序)。
// 合并函数:将两个有序子数组合并成一个有序数组
// arr: 原始数组
// left, mid, right: 左、中、右边界
// temp: 临时数组,用于存储合并结果
void merge(std::vector<int>& arr, int left, int mid, int right, bool ascending, std::vector<int>& temp) {
int i = left; // 左子数组的起始索引
int j = mid + 1;// 右子数组的起始索引
int k = left; // 临时数组的起始索引
// 比较两个子数组的元素,将较小(或较大)的元素放入临时数组
while (i <= mid && j <= right) {
if (ascending) {
if (arr[i] <= arr[j]) {
temp[k++] = arr[i++];
} else {
temp[k++] = arr[j++];
}
} else {
if (arr[i] >= arr[j]) {
temp[k++] = arr[i++];
} else {
temp[k++] = arr[j++];
}
}
}
// 将左子数组中剩余的元素复制到临时数组
while (i <= mid) {
temp[k++] = arr[i++];
}
// 将右子数组中剩余的元素复制到临时数组
while (j <= right) {
temp[k++] = arr[j++];
}
// 将临时数组中的结果复制回原始数组
for (int x = left; x <= right; ++x) {
arr[x] = temp[x];
}
}
// 归并排序递归函数
void mergeSortRecursive(std::vector<int>& arr, int left, int right, bool ascending, std::vector<int>& temp) {
if (left < right) {
int mid = left + (right - left) / 2; // 计算中间点,避免溢出
// 递归地对左右两个子数组进行排序
mergeSortRecursive(arr, left, mid, ascending, temp);
mergeSortRecursive(arr, mid + 1, right, ascending, temp);
// 合并两个已排序的子数组
merge(arr, left, mid, right, ascending, temp);
}
}
// 归并排序入口函数
void mergeSort(std::vector<int>& arr, bool ascending = true) {
if (arr.empty()) return;
std::vector<int> temp(arr.size()); // 创建一个与原数组大小相同的临时数组
mergeSortRecursive(arr, 0, arr.size() - 1, ascending, temp);
}
int main() {
std::vector<int> arr = {12, 11, 13, 5, 6, 7};
std::cout << "Original array: ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
mergeSort(arr); // 默认升序排序
std::cout << "Sorted array (ascending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
mergeSort(arr, false); // 降序排序
std::cout << "Sorted array (descending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
return 0;
}
6. 堆排序
- 核心思想:利用“堆”这种数据结构的特性(堆顶元素是最大或最小元素),每次取出堆顶元素,然后调整堆,重复此过程直到堆为空。
- 实现步骤:
1. 将待排序序列构建成一个大顶堆(或小顶堆)。 2. 将堆顶元素(最大或最小)与堆的最后一个元素交换。 3. 调整堆的大小(减少 1),并对新的堆顶元素进行“下沉”操作,维持堆的性质。 4. 重复步骤 2 和 3,直到堆为空。 - 时间复杂度:
- 最好、最坏、平均:均为
。 - 建堆的时间复杂度为
,随后进行 次调整,每次调整 。
- 最好、最坏、平均:均为
- 空间复杂度:
。 - 直接在原数组上操作,不需要额外空间,这是它优于归并排序的地方。
- 稳定性:不稳定。
- 由于在交换堆顶和末尾元素时,可能会破坏相等元素的相对顺序。
- 适用场景:大规模数据排序,对空间复杂度要求较高的场景。
// 堆调整函数(大顶堆)
// arr: 待调整的数组
// size: 堆的大小
// i: 当前需要调整的节点索引
void heapifyMax(std::vector<int>& arr, int size, int i) {
int largest = i; // 初始化最大元素为根节点
int left = 2 * i + 1; // 左子节点索引
int right = 2 * i + 2; // 右子节点索引
// 如果左子节点大于根节点
if (left < size && arr[left] > arr[largest]) {
largest = left;
}
// 如果右子节点大于当前最大元素
if (right < size && arr[right] > arr[largest]) {
largest = right;
}
// 如果最大元素不是根节点
if (largest != i) {
std::swap(arr[i], arr[largest]);
// 递归地调整受影响的子树
heapifyMax(arr, size, largest);
}
}
// 堆调整函数(小顶堆)
void heapifyMin(std::vector<int>& arr, int size, int i) {
int smallest = i; // 初始化最小元素为根节点
int left = 2 * i + 1; // 左子节点索引
int right = 2 * i + 2; // 右子节点索引
if (left < size && arr[left] < arr[smallest]) {
smallest = left;
}
if (right < size && arr[right] < arr[smallest]) {
smallest = right;
}
if (smallest != i) {
std::swap(arr[i], arr[smallest]);
heapifyMin(arr, size, smallest);
}
}
// 堆排序函数
// arr: 待排序的数组
// ascending: true 表示升序,false 表示降序
void heapSort(std::vector<int>& arr, bool ascending = true) {
int n = arr.size();
// 1. 构建堆
// 从最后一个非叶子节点开始向上调整
if (ascending) {
// 构建大顶堆用于升序排序
for (int i = n / 2 - 1; i >= 0; --i) {
heapifyMax(arr, n, i);
}
} else {
// 构建小顶堆用于降序排序
for (int i = n / 2 - 1; i >= 0; --i) {
heapifyMin(arr, n, i);
}
}
// 2. 从堆中提取元素
for (int i = n - 1; i > 0; --i) {
// 将堆顶元素(最大或最小)与当前堆的最后一个元素交换
std::swap(arr[0], arr[i]);
// 调整剩余的元素,维持堆的性质
if (ascending) {
heapifyMax(arr, i, 0);
} else {
heapifyMin(arr, i, 0);
}
}
}
int main() {
std::vector<int> arr = {12, 11, 13, 5, 6, 7};
std::cout << "Original array: ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
heapSort(arr); // 默认升序排序
std::cout << "Sorted array (ascending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
heapSort(arr, false); // 降序排序
std::cout << "Sorted array (descending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
return 0;
}
7.基于二叉搜索树的排序
- 核心流程:
- 构建 BST:遍历待排序数组,将每个元素逐个插入到一棵二叉搜索树中。
- 根据 BST 的性质:左子树的所有节点 < 根节点 < 右子树的所有节点。
- 中序遍历:对构建好的二叉搜索树进行中序遍历。
- 按照“左子树
根节点 右子树”的顺序读取,得到的序列自然就是有序的。
- 按照“左子树
- 构建 BST:遍历待排序数组,将每个元素逐个插入到一棵二叉搜索树中。
- 时间复杂度
- 在平均/最好情况下,BST Sort 的表现为
。 - 在最坏情况下(例如输入数据已经是有序的),BST 会退化成一条直线(链表),此时性能会大幅下降至
。
- 在平均/最好情况下,BST Sort 的表现为
- 空间复杂度:O(n)
- 稳定性:稳定
|
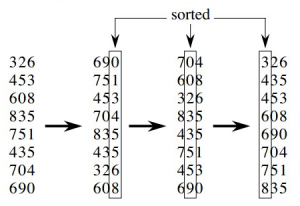
8.基数排序
- 核心原理:将整数按位数切割成不同的数字,然后按每个位数分别比较。
- 第一步:先按所有数字的个位进行排序,放入 0-9 号“桶”中。
- 第二步:保持个位的相对顺序,再按十位进行排序。
- 第三步:保持前两步的相对顺序,最后按百位进行排序。
- 时间复杂度:
- **
- 其中
是元素个数, 是数字的最大位数(如三位数 ), 是基数范围(十进制中 )。由于 和 对于特定类型通常是常数,基数排序在处理大量整数时往往比 的算法更快。
- **
- 空间复杂度:
- **
- 需要额外的
output数组和count桶空间。
- **
- 稳定性:
- 稳定。基数排序必须依赖稳定的子排序过程(如计数排序),否则高位的排序会打乱低位已排好的顺序。

- 稳定。基数排序必须依赖稳定的子排序过程(如计数排序),否则高位的排序会打乱低位已排好的顺序。
|
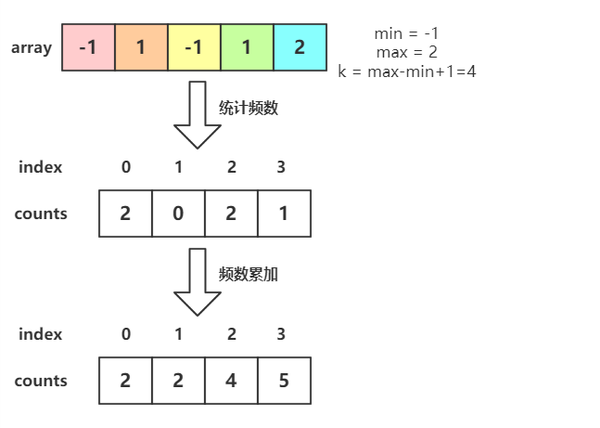
9. 计数排序
- 核心思想:
- 非比较排序:计数排序不通过元素间的比较来决定顺序,而是利用数组下标来确定元素的正确位置。
- 空间换时间:通过统计每个元素出现的次数,直接计算出每个元素在输出序列中的位置。它要求输入数据必须是有确定范围的整数
- 实现步骤:
1. 找范围:找出待排序数组中最大和最小的元素,确定统计数组(桶)的大小。 2. 统计次数:遍历原数组,在统计数组中记录每个元素出现的频率。 3. 累加计数:对统计数组进行前缀和运算,使得`count[i]` 存储的是小于等于 i 的元素总个数。 4. 反向填充:反向遍历原数组,根据统计数组中的位置信息将元素放入结果数组,并递减统计数组中的计数值(反向遍历是为了保证排序的稳定性)。 - 时间复杂度:
- 最好情况/最坏情况/平均情况:
。 - 其中
为元素个数, 为数据的取值范围( )。当 时,复杂度为线性。
- 最好情况/最坏情况/平均情况:
- 空间复杂度:
- 需要一个大小为
的统计数组和一个大小为 的结果数组。
- 需要一个大小为
- 稳定性:稳定。
- 在反向填充步骤中,相同元素的相对顺序被保留。
- 适用场景:适用于数据范围
远小于 的整数排序(如统计考试分数、年龄分布等)。
// 计数排序函数
// arr: 原始数组
// ascending: 是否升序
void countingSort(std::vector<int>& arr, bool ascending = true) {
if (arr.empty()) return;
// 1. 寻找最大值和最小值以确定范围
int maxVal = *std::max_element(arr.begin(), arr.end());
int minVal = *std::min_element(arr.begin(), arr.end());
int range = maxVal - minVal + 1;
// 2. 统计每个元素出现的次数
std::vector<int> count(range, 0);
for (int x : arr) {
count[x - minVal]++;
}
// 3. 累加计数(计算前缀和),确定每个元素的最后位置
if (ascending) {
for (int i = 1; i < range; ++i) {
count[i] += count[i - 1];
}
} else {
// 如果是降序,则从后往前累加
for (int i = range - 2; i >= 0; --i) {
count[i] += count[i + 1];
}
}
// 4. 反向遍历原数组,保证稳定性,填充结果数组
std::vector<int> output(arr.size());
for (int i = arr.size() - 1; i >= 0; --i) {
int val = arr[i];
int pos = count[val - minVal] - 1; // 获取在输出数组中的索引
output[pos] = val;
count[val - minVal]--; // 更新位置,供下一个相同元素使用
}
// 将结果复制回原数组
arr = output;
}
int main() {
std::vector<int> arr = {4, 2, 2, 8, 3, 3, 1};
std::cout << "Original array: ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
countingSort(arr, true); // 升序
std::cout << "Sorted array (ascending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
countingSort(arr, false); // 降序
std::cout << "Sorted array (descending): ";
for (int x : arr) std::cout << x << " ";
std::cout << std::endl;
return 0;
}
四、排序算法性能对比
| 算法 | 时间复杂度(最坏) | 时间复杂度(平均) | 时间复杂度(最好) | 空间复杂度 | 稳定性 | 原地排序 |
|---|---|---|---|---|---|---|
| 插入排序 | O(n^2) |
O(n^2) |
O(n) |
O(1) |
稳定 | 是 |
| 冒泡排序 | O(n^2) |
O(n^2) |
O(n) |
O(1) |
稳定 | 是 |
| 选择排序 | O(n^2) |
O(n^2) |
O(n^2) |
O(1) |
不稳定 | 是 |
| 快速排序 | O(n^2) |
O(n log n) |
O(n log n) |
O(log n) |
不稳定 | 是 |
| 归并排序 | O(n log n) |
O(n log n) |
O(n log n) |
O(n) |
稳定 | 否 |
| 堆排序 | O(n log n) |
O(n log n) |
O(n log n) |
O(1) |
不稳定 | 是 |
| 计数排序 | O(n + k) |
O(n + k) |
O(n + k) |
O(k) |
稳定 | 否 |
| 基数排序 | O(d * (n + k)) |
O(d * (n + k)) |
O(d * (n + k)) |
O(n + k) |
稳定 | 否 |
说明:
k:计数排序中表示数据的范围,基数排序中表示每个位数的取值范围(通常为 10)。d:基数排序中表示数据的最大位数。